Water filling plant
![Water filling plant]()

![Water filling plant]()
Physical Attributes
![Cellphone operated robot]()
![Hand Gesture Based Robot]()
![Automatic RF based land rover]()





Specification
Description
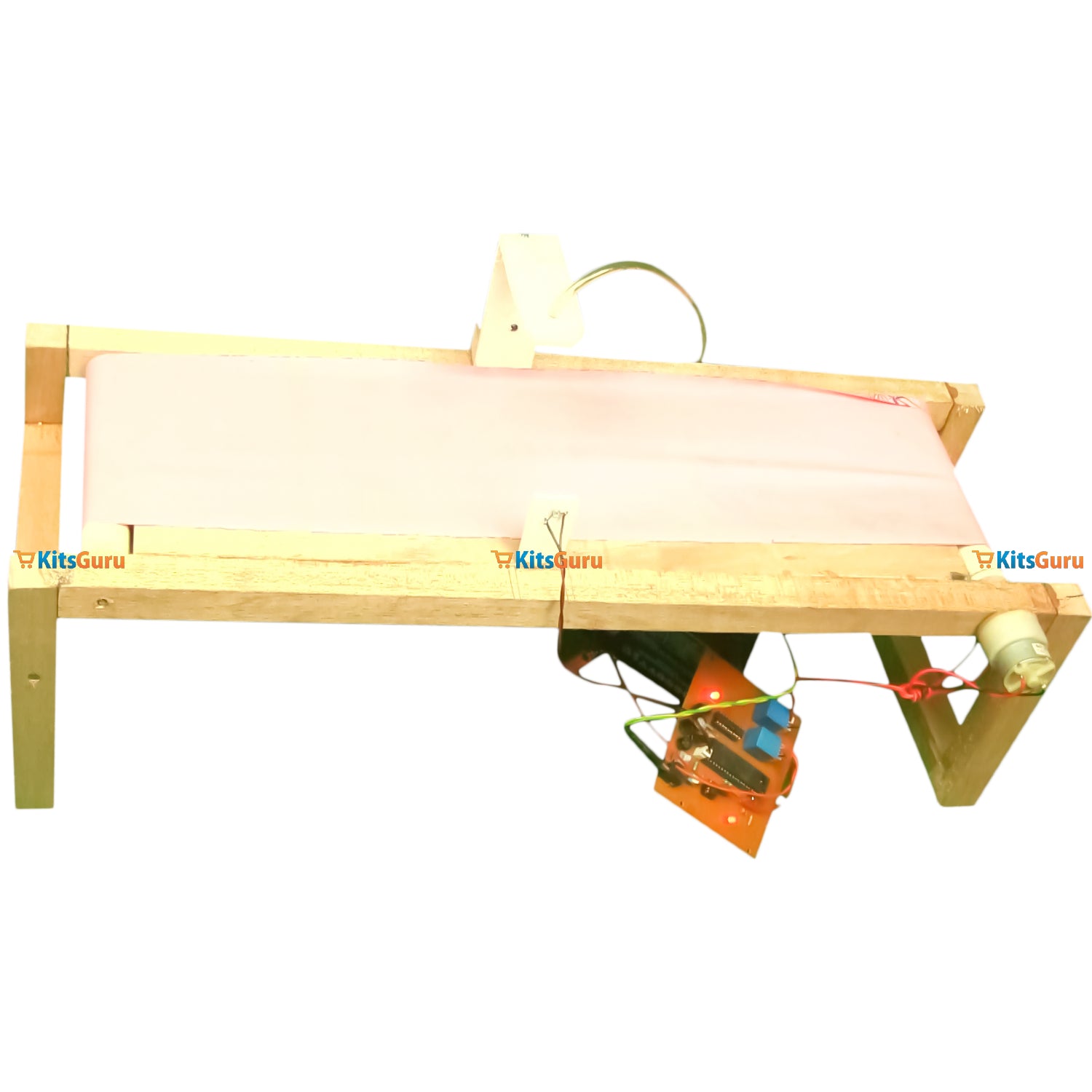
The water filling plant has two sensors are mounted in the system to sense the position of the bottle. As soon as the bottle comes below the water filler, it is automatically stopped and bottle filling will be started. After a certain time interval it gets filled with water, and hence it is forwarded out and another bottle comes for filling. This operation continues till we want.The objective of the kit Water bottle filling plant is to design a prototype of a water bottle filling plat, in which the filling of water or any other fluid takes place automatically in a number of bottles.
In the Water bottle filling plant sensors used here are IR sensors. The analog outputs of the IR sensor are compared with the comparator and digital data is given to the microcontroller. The controller used here is 8051 family. For the comparator, we have used LM324. DC motors are used to drive the conveyer belt. L293D is used to interface DC motors with microcontrollers.
- The filling of water or any other fluid takes place automatically in a number of bottles.
- It is strong and durable.
- L293D is used to interface DC motors with microcontrollers.
- The controller used here is 8051 family.
Physical Attributes
- Dimensions (cm) L x W x H : 28 x 24 x 8
- Weight (gm): 1000
Product Video
Related items


₹ 2,500.00


₹ 4,000.00


₹ 3,000.00

₹ 2,499.00
₹ 3,499.00