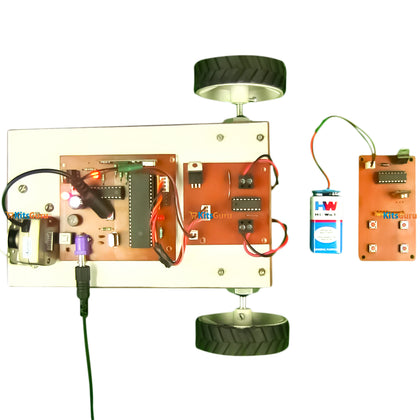
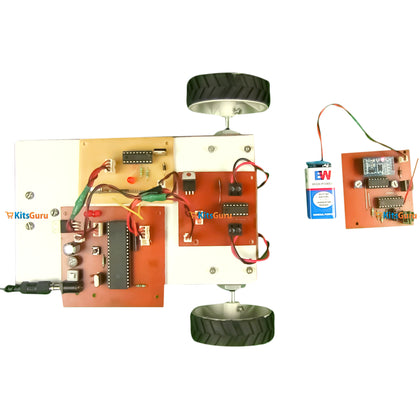
Wireless Robotic arm

![Wireless Robotic arm]()

![Wireless Robotic arm]()
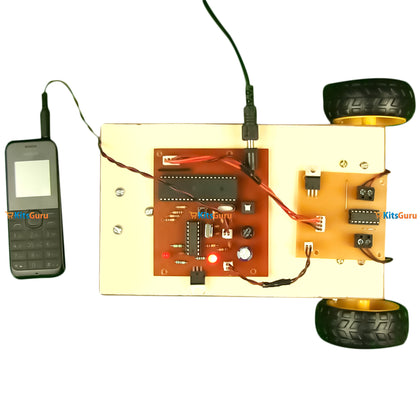
![Cellphone operated robot]()
![Hand Gesture Based Robot]()
![Automatic RF based land rover]()





Specification
Description
A robotic arm is a robot manipulator, usually programmable, with similar functions to a human arm. The links of such a manipulator are connected by joints allowing either rotational motion (such as in an articulated robot) or translational (linear) displacement. The links of the manipulator can be considered to form a kinematic chain. The business end of the kinematic chain of the manipulator is called the end effectors and it is analogous to the human hand. the end effectors can be designed to perform any desired task such as welding, gripping, spinning etc., depending on the application. For example robot arms in automotive assembly lines perform a variety of tasks such as welding and parts rotation and placement during assembly.Physical Attributes
- Dimensions (cm) L x W x H : 28 x 24 x 8
- Weight (gm): 1000
Product Video
Related items


₹ 2,500.00


₹ 4,000.00


₹ 3,000.00

₹ 2,499.00
₹ 3,499.00