Original APM 2.8 Flight Controller with Built-in Compass with cables
![APM 2.8 Flight Controller with Built-in Compass]()

![APM 2.8 Flight Controller with Built-in Compass_1]()

![APM 2.8 Flight Controller with Built-in Compass with usb]()

![APM 2.8 Flight Controller with Built-in Compass_2]()

![APM 2.8 Flight Controller with Built-in Compass_3]()

![APM 2.8 Flight Controller with Built-in Compass]()

![APM 2.8 Flight Controller with Built-in Compass_1]()

![APM 2.8 Flight Controller with Built-in Compass with usb]()

![APM 2.8 Flight Controller with Built-in Compass_2]()

![APM 2.8 Flight Controller with Built-in Compass_3]()


Built-in Compass: The built-in compass helps the flight controller in determining its orientation.
GPS Compatibility: APM 2.8 is compatible with GPS modules for accurate positioning and navigation.
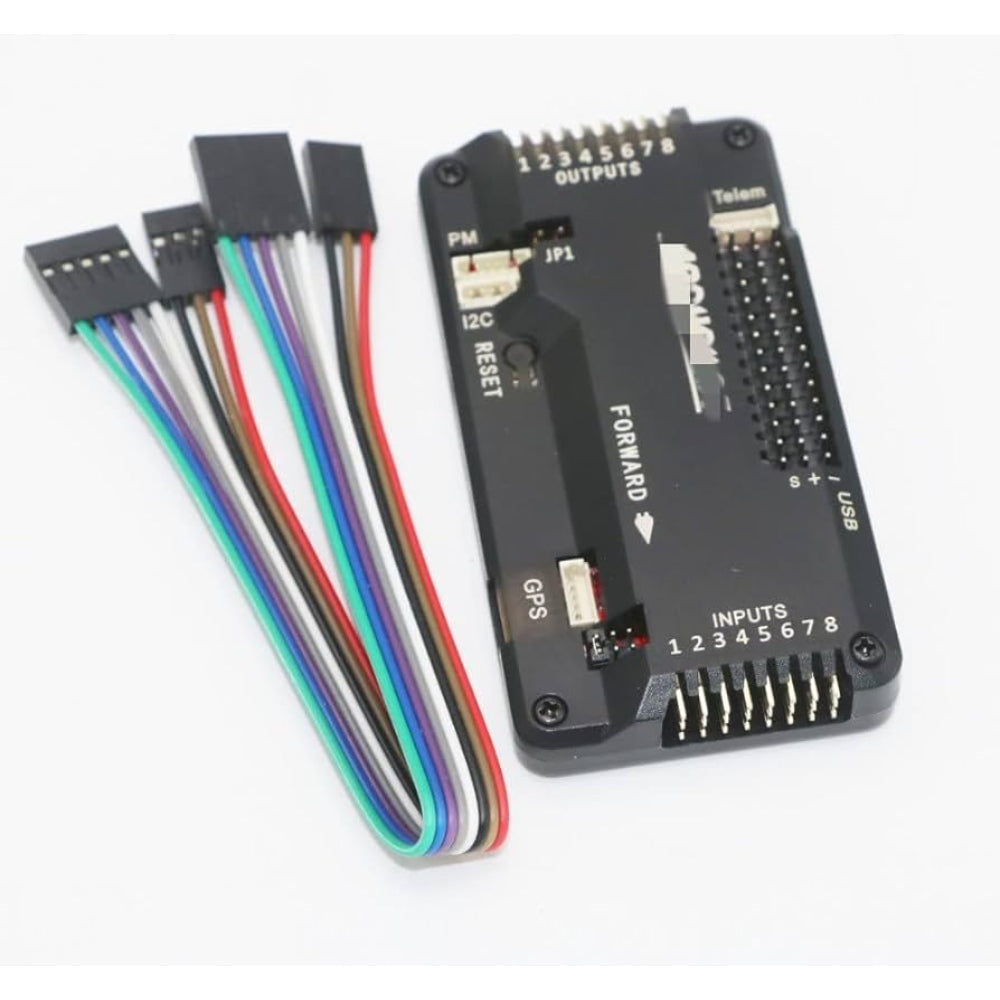
Expansion Ports: It usually has various ports for connecting additional sensors, telemetry modules, and other peripherals.
Multiple Flight Modes: APM supports various flight modes, including stabilizing, altitude hold, loiter, RTL (Return to Launch), and more.
Open-Source Firmware: The APM firmware is open-source, allowing users to modify and customize the software for their specific needs.
Select mission commands from drop-down menus.
Download mission logs files and analyze them.
Configure APM settings for your airframe.
Interface with a PC flight simulator to create a full hardware-in-the-loop UAV simulator.
See the output from APM’s serial terminal.

![SP Racing F3 ACRO Flight Controller]()

![SP Racing F3 ACRO Flight Controller]()
-30%















Original APM 2.8 Flight Controller with Built-in Compass with cables
Available:In Stock
- Product SKU: LGAR079
₹ 5,299
₹ 7,599
Need Volume Discounts? Deals are specially designed for you. Click here
Need Customization? Provide us more details Click here
🏠
Warehouse Details:


Specification
Description
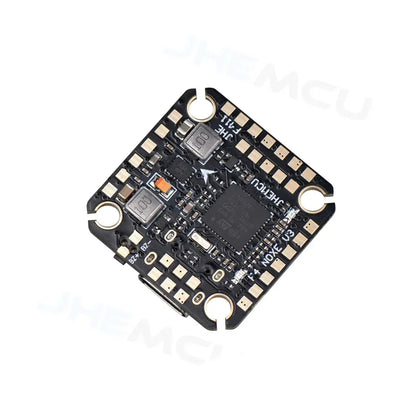
The APM 2.8 (ArduPilot Mega) is an open-source flight controller designed for autonomous aircraft. It comes with a built-in compass for better orientation and navigation. The APM 2.8 is an older model, and there may be newer versions available.
Here are some key Features of the APM 2.8 Flight Controller:
Microprocessor: It typically uses an ATmega2560 microcontroller.Built-in Compass: The built-in compass helps the flight controller in determining its orientation.
GPS Compatibility: APM 2.8 is compatible with GPS modules for accurate positioning and navigation.
Expansion Ports: It usually has various ports for connecting additional sensors, telemetry modules, and other peripherals.
Multiple Flight Modes: APM supports various flight modes, including stabilizing, altitude hold, loiter, RTL (Return to Launch), and more.
Open-Source Firmware: The APM firmware is open-source, allowing users to modify and customize the software for their specific needs.
Powerful Ground Control Software Features:
The downloadable mission planner software is used to configure and control your APM board: Point-and-click waypoint entry, using Google Maps.Select mission commands from drop-down menus.
Download mission logs files and analyze them.
Configure APM settings for your airframe.
Interface with a PC flight simulator to create a full hardware-in-the-loop UAV simulator.
See the output from APM’s serial terminal.
Technical Details
- Power supply:LP2985-3.3.
- Port: MUX (UART0, UART2, mnnI2, and OSD are optional, OSD is the defaulted output).
- Input Voltage (V):12~16 VDC
- Sensors:3-Axis Gyrometer, Accelerometer, High-performance Barometer
- Processor:ATMEGA2560 and ATMEGA32U-2
- Micro-SD Card Slot: No
Features
- Straight Needle
- Arduino Compatible
- Onboard 4 MegaByte Dataflash chip for automatic data logging.
- Optional off-board GPS, a uBlox LEA-6H module with Compass.
- One of the first open-source autopilot systems to use Invensense’s 6 DoF Accelerometer/Gyro MPU-6000.
- Barometric pressure sensor upgraded to MS5611-01BA03, from Measurement Specialties.
- Atmel’s ATMEGA2560 and ATMEGA32U-2 chips for processing and USB functions respectively.
Physical Attributes
- Dimensions (mm) LxWxH: 70 x 45 x 15
- Weight (gm): 67
Product Video
Package Includes
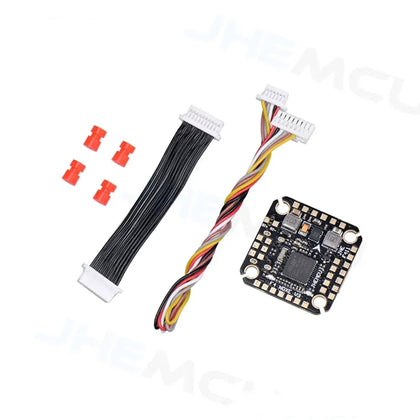
- 1 x APM2.8 board
- 1 x Connecting Wires.
- 1 x Micro USB-A to Micro-B Cable -100cm White
Related items














Sold Out