PC controlled robotic arm

![PC controlled robotic arm]()

![PC controlled robotic arm]()


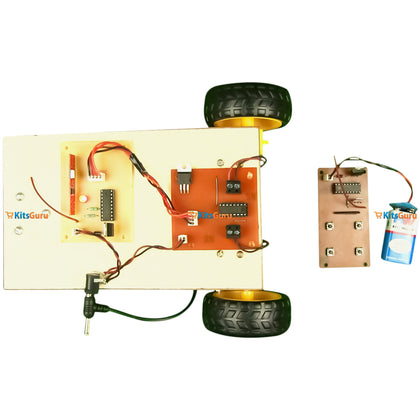
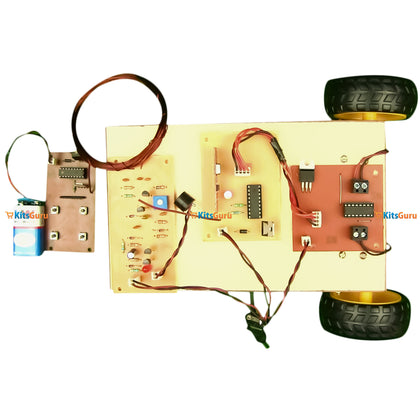
In this kit PC Controlled Robotic Arm; 4 degrees of motion we are controlling the movements of a robotic arm with the help of a serial port or simply we can say through the computer. The working of this kit is very simple. In this, we did programming in VISUAL BASIC and interfaced the serial port of the microcontroller of 8051 families with an h-bridge. As the user presses a key on the keyboard, that is sent to the program which analyzes it and on the basis of that sends a signal to the serial port which is already interfaced with controller which operates the motor driver motor. Now the motor driver will receive the signals from the controller and on the basis of those signals drive the motors used in the arm. As a result of which movement took place in the arm.
Physical Attributes
![Cellphone operated robot]()
![Hand Gesture Based Robot]()
![Automatic RF based land rover]()
![Anti Landmine Rovor]()



PC controlled robotic arm
Available:In Stock
- Product SKU: LGRB016
₹ 8,000
🏠
Warehouse Details:


Specification
Description
The purpose of kit PC Controlled Robotic Arm; 4 degrees of motion is to design a robotic arm with four degrees of motion that can be worked as the human arm. It can perform any desired task such as welding, gripping, spinning, etc., depending on the application. A robotic arm is a mechanical arm that is usually programmable and the arm may be a sum total of the mechanism or can be part of a complex robot. To design a robot, various links are being connected by joints allowing either a translational (linear) motion or a rotational motion in various planes. In many cases, sensors are used in the arm that usually indicates the controller about the hardness by which the gripping is done by arm or directs the arm in directions in which it should move to perform the task or it tells the system about the presence of an object in front of it.In this kit PC Controlled Robotic Arm; 4 degrees of motion we are controlling the movements of a robotic arm with the help of a serial port or simply we can say through the computer. The working of this kit is very simple. In this, we did programming in VISUAL BASIC and interfaced the serial port of the microcontroller of 8051 families with an h-bridge. As the user presses a key on the keyboard, that is sent to the program which analyzes it and on the basis of that sends a signal to the serial port which is already interfaced with controller which operates the motor driver motor. Now the motor driver will receive the signals from the controller and on the basis of those signals drive the motors used in the arm. As a result of which movement took place in the arm.
Physical Attributes
- Dimensions (cm) L x W x H : 28 x 24 x 8
- Weight (gm): 1000
Product Video
Related items


₹ 2,500.00


₹ 4,000.00


₹ 3,000.00

₹ 2,499.00
₹ 3,499.00


₹ 3,000.00