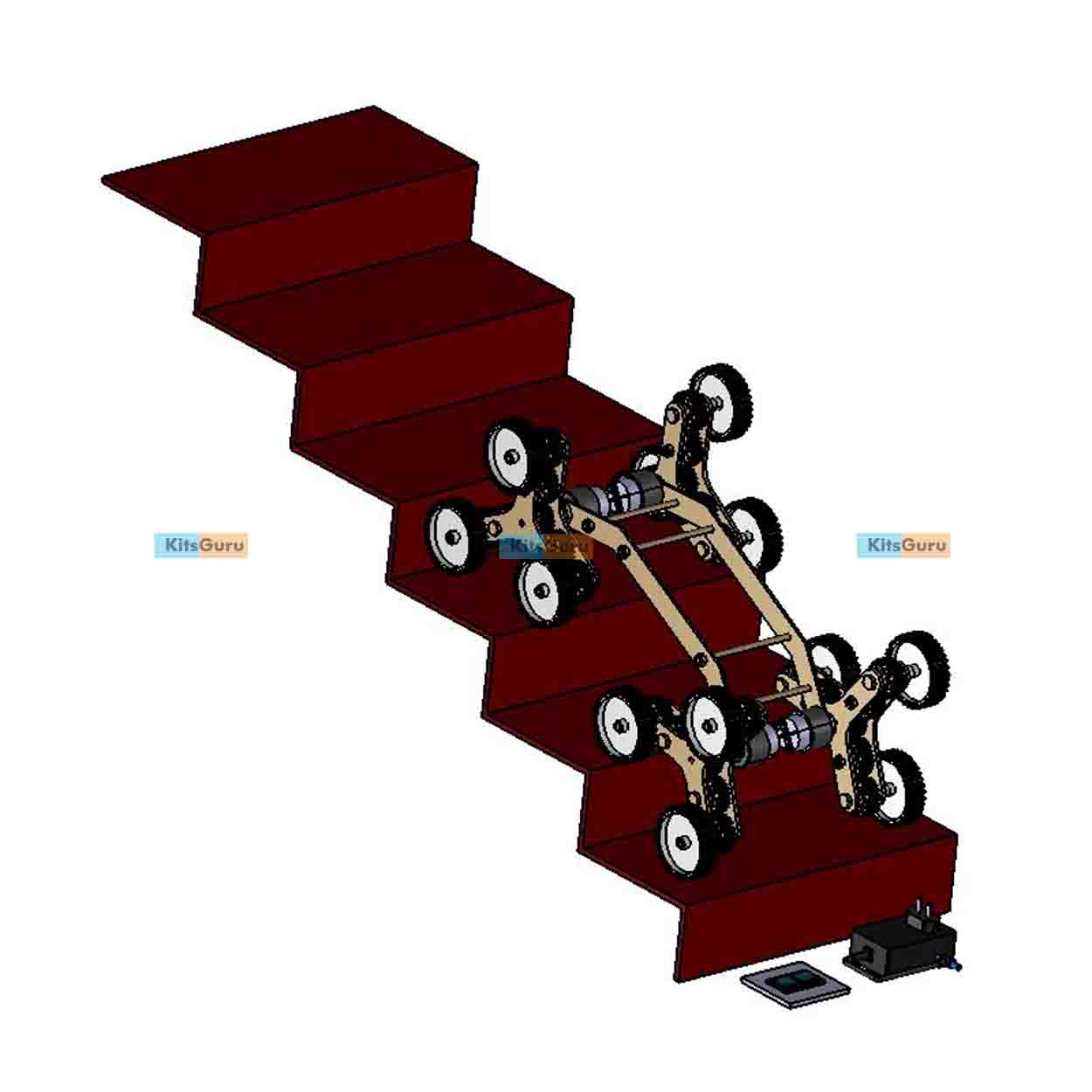
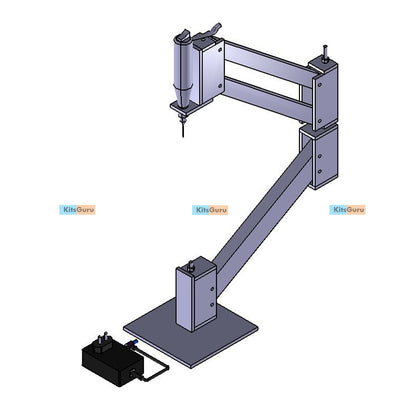
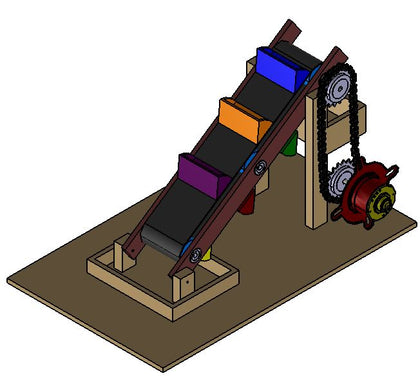
Stair Climbing Planetary Robot
![Stair Climbing Planetary Robot]()

![Stair Climbing Planetary Robot]()


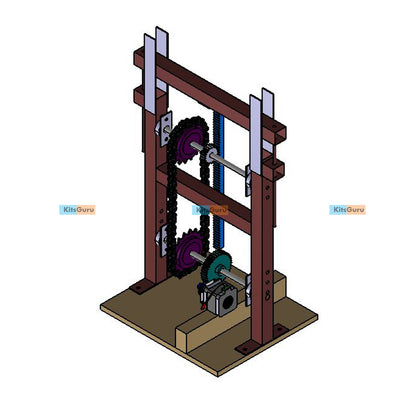
An epicyclic gear train consists of two gears mounted so that the center of one gear revolves around the center of the other. A carrier connects the centers of the two gears and rotates to carry one gear, called the planet gear, around the other, called the sun gear. The planet and sun gears mesh so that their pitch circles roll without slipping. A point on the pitch circle of the planet gear traces an epicycloids curve. In this simplified case, the sun gear is fixed and the planetary gear(s) roll around the sun gear.
An epicyclic gear train can be assembled so the planet gear rolls on the inside of the pitch circle of a fixed, outer gear ring, which is called an annular gear. In this case, the curve traced by a point on the pitch circle of the planet is a hypocycloid.
-25%



Stair Climbing Planetary Robot
Available:In Stock
- Product SKU: LGME003
₹ 10,000
₹ 13,500
Warehouse Details


Specification
Description
Wheeled and tracked vehicles, while cheaper than bipedal or jumping robots, often have problems with slippage. The Loper robotic platform has solved this problem with an innovative wheel design for mobile robots consisting of three lobes connected to a central hub that essentially act as cogs for the purpose of stair climbing. The design enables fast stair climbing at a reduced platform weight. The chassis design provides a light, flexible and rugged platform that is ideal for agile operation.An epicyclic gear train consists of two gears mounted so that the center of one gear revolves around the center of the other. A carrier connects the centers of the two gears and rotates to carry one gear, called the planet gear, around the other, called the sun gear. The planet and sun gears mesh so that their pitch circles roll without slipping. A point on the pitch circle of the planet gear traces an epicycloids curve. In this simplified case, the sun gear is fixed and the planetary gear(s) roll around the sun gear.
An epicyclic gear train can be assembled so the planet gear rolls on the inside of the pitch circle of a fixed, outer gear ring, which is called an annular gear. In this case, the curve traced by a point on the pitch circle of the planet is a hypocycloid.
Physical Attributes
- Dimensions (cm) L x W x H : 40 x 30 x 18
- Weight (gm): 3000
Related items

₹ 4,000.00
₹ 5,500.00

₹ 4,500.00
₹ 7,000.00

₹ 12,000.00
₹ 15,000.00




₹ 18,000.00
₹ 20,000.00

₹ 9,000.00
₹ 11,000.00